Nachdem ich schön länger überlegt habe ein Auto mit dem Arduino zu bauen, habe ich heute damit angefangen ein altes ferngesteuertes Auto auszuschlachten und mit dem Arduino zu steuern.
Das
ferngesteuertes Auto
wird eigentlich durch nur zwei Motoren gesteuert. Der Eine treibt die Hinterreifen an, der Andere lenkt die Achse vorne. Glücklicherweise sind bei mir die Kabel entsprechend farbig(Ground schwarz).Das bedeutet, dass man zwei Motoren steuern können muss, wobei man jeweils die Richtung und die Stärke einstellen können muss. Für diese Aufgabe scheint ein
L293D prädestiniert zu sein.
Das ist ein Baustein der zwei Motoren unabhängig steuern kann(genau die Anforderungen). Zusätzlich verwende ich einen Ultraschallsensor, den ich, wie ich
hier erklärt, angeschlossen haben. Eventuell werde ich noch Einen rechts und Einen links anschließen, um die Seiten zu überwachen.
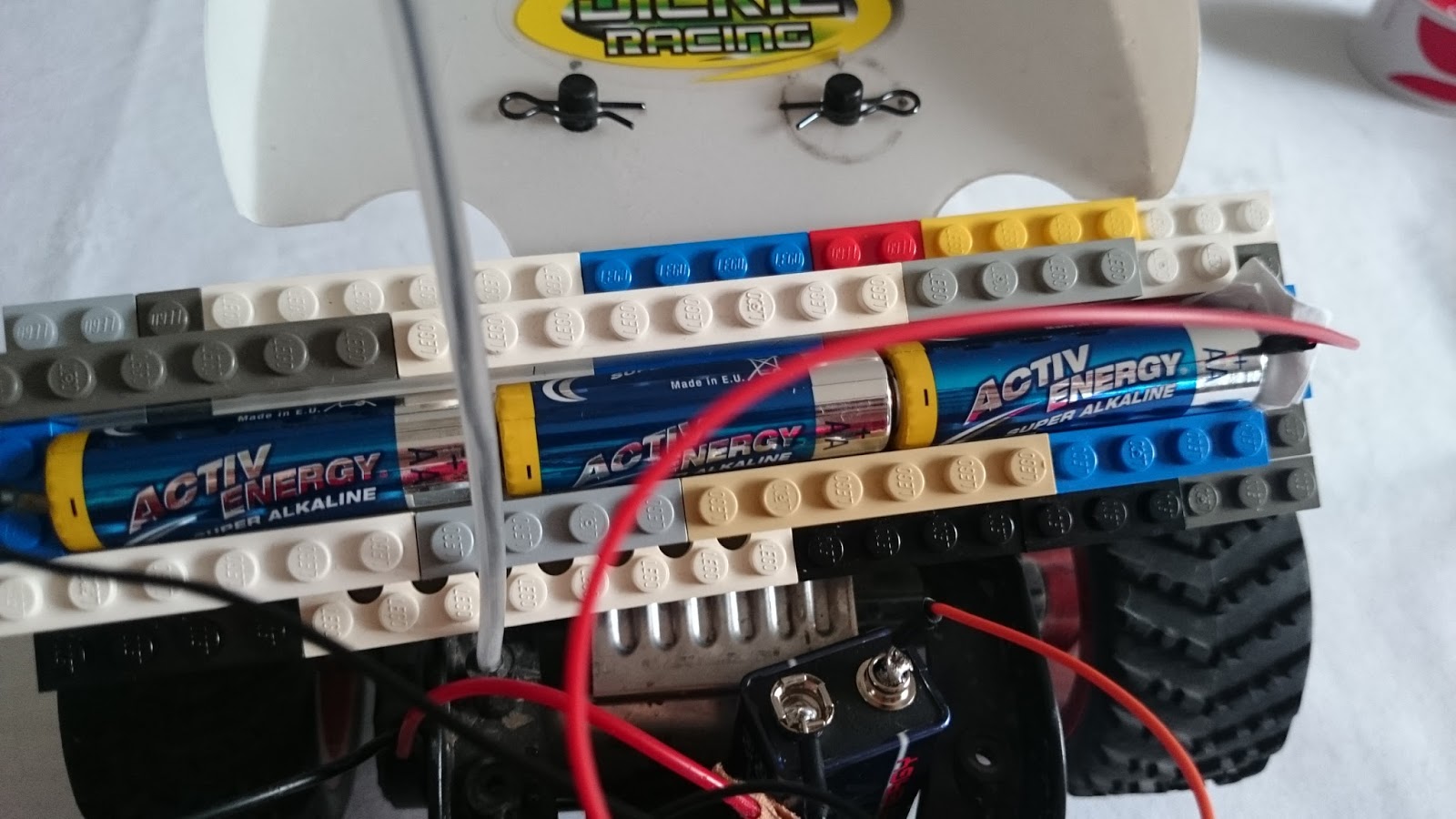
Ich habe bisher die gesamte Schaltung auf dem Breadboard gelassen um schnell Veränderungen vornehmen zu können. Ich verwende bisher zur Stormversorgung eine 9V Blockbatterie, für die Motoren und drei 1.5V Batterien, für den Arduino und den Ultraschallsensor. Ich habe die 1.5V Batterien in ein Legogehäuse gesteckt und dort die Kabel eingeklemmt. Bei der 9V Batterie habe ich einfach die Kabel an die Kontakte gelötet.
Da der Arduino an sich unhandlich ist, programmiere ich über ihn einen ATmega328. Den schließt man wie
hier an, dort steht auch, wie man ihn über den Arduino programmiert.




Keine Kommentare:
Kommentar veröffentlichen
Mit dem Veröffentlichen eines Kommentars erklären Sie sich mit unserer Datenschutzerklärung einverstanden.
https://michaelsarduino.blogspot.de/p/datenschutzerklarung.html